Abstract
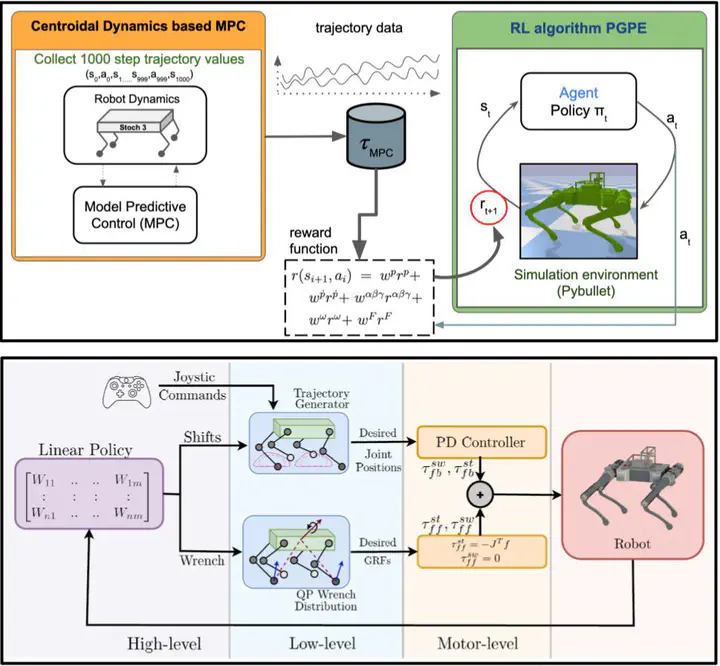
This work presents a simple linear policy for direct force control for quadrupedal robot locomotion. The motivation is that force control is essential for highly dynamic and agile motions. We learn a linear policy to generate end-foot trajectory parameters and a centroidal wrench, which is then distributed among the legs based on the foot contact information using a quadratic program (QP) to get the desired ground reaction forces. Unlike the majority of the existing works that use complex nonlinear function approximators to represent the RL policy or model predictive control (MPC) methods with many optimization variables in the order of hundred, our controller uses a simple linear function approximator to represent policy along with only a twelve variable QP for the force distribution. A centroidal dynamics-based MPC method is used to generate reference trajectory data, and then the linear policy is trained using imitation learning to minimize the deviations from the reference trajectory. We demonstrate this compute-efficient controller on our robot Stoch3 in simulation and real-world experiments on indoor and outdoor terrains with push recovery.
Aditya Shirwatkar
PhD Student (IISc) | Visiting Researcher (TUM)
My research interests include robotics (primarily legged), optimal control, and reinforcement learning.