Formal Control of Robotic Systems
This work includes two projects, one as a final term exam and a final lab exercise.
Final Term Exam
Studied, Implemented and Extended the work 1 in MATLAB
Final Lab Exercise
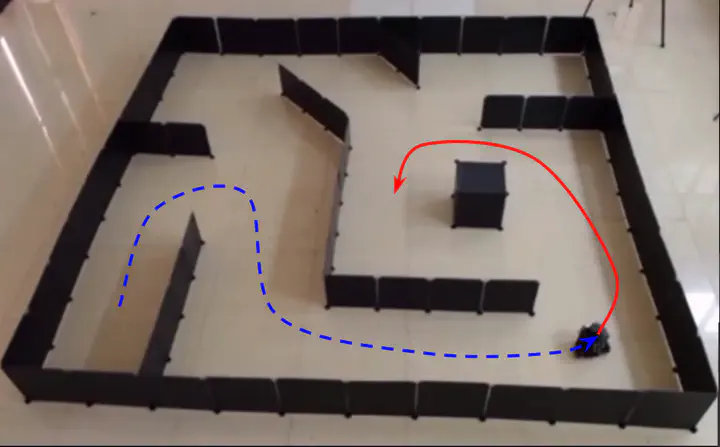
Designed and Implemented a Controller for a three-wheeled omnidirectional robot to satisfy a given Signal Temporal Logic Specification (STL) in simulation and real-world. The implemented controller is inspired from 2 and 3
-
Rodionova, Alena, Lars Lindemann, Manfred Morari and George J. Pappas. “Time-Robust Control for STL Specifications.” 2021 60th IEEE Conference on Decision and Control (CDC) (2021): 572-579. ↩︎
-
L. Lindemann, C. K. Verginis and D. V. Dimarogonas, “Prescribed performance control for signal temporal logic specifications,” 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, VIC, Australia, 2017, pp. 2997-3002, doi: 10.1109/CDC.2017.8264095. ↩︎
-
M. Sewlia, C. K. Verginis and D. V. Dimarogonas, “Cooperative Object Manipulation Under Signal Temporal Logic Tasks and Uncertain Dynamics,” in IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 11561-11568, Oct. 2022, doi: 10.1109/LRA.2022.3200760. ↩︎
Aditya Shirwatkar
PhD Student (IISc) | Visiting Researcher (TUM)
My research interests include robotics (primarily legged), optimal control, and reinforcement learning.