A2
A2
Home
Publications
Experience
Talks
Projects
Contact
CV
Drawings
1
PIP-Loco: A Proprioceptive Infinite Horizon Planning Framework for Quadrupedal Robot Locomotion
2025 IEEE International Conference on Robotics and Automation (ICRA), Atlanta
Aditya Shirwatkar
,
Naman Saxena
,
Kishore Chandra
,
Shishir Kolathaya
PDF
Code
Project
Video
DOI
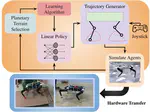
Force control for Robust Quadruped Locomotion: A Linear Policy Approach
2023 IEEE International Conference on Robotics and Automation (ICRA), London
Aditya Shirwatkar
,
Vamshi Kumar Kurva
,
Devaraju Vinoda
,
Aman Singh
,
Aditya Sagi
,
Himanshu Lodha
,
Bhavya Giri Goswami
,
Shivam Sood
,
Ketan Nehete
,
Shishir Kolathaya
PDF
Video
DOI
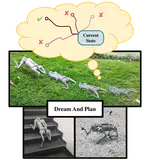
Realizing Linear Controllers for Quadruped Robots on Planetary Terrains
2023 International Conference on Advances in Robotics (AIR)
Aditya Shirwatkar
,
Somnath Sendhil Kumar
,
Shamrao Garur
,
Vinod Kumar
,
Shishir Kolathaya
PDF
Video
DOI
Cite
×