QHuMuS: Quadrupedal Humanoidal Multi-terrain Snake Robot
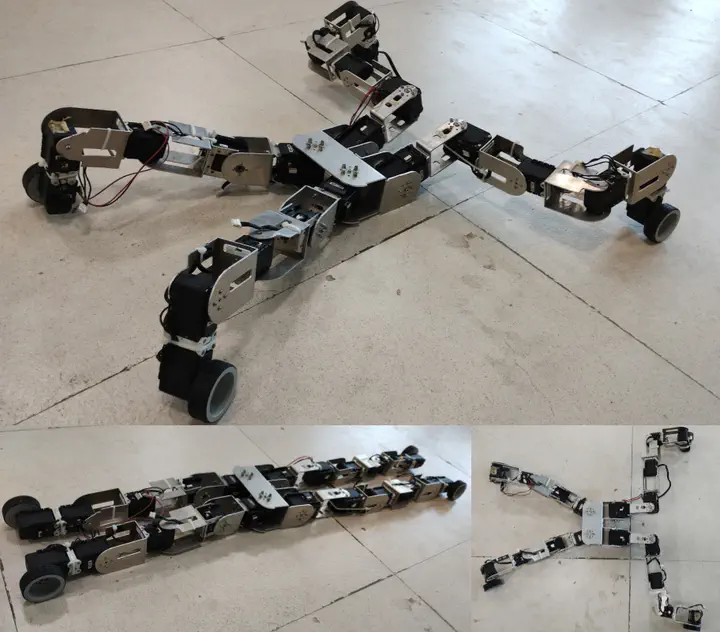
For ground robotic systems, different trade-offs must be made when selecting movement modes such as serpentine, legged, and wheeled. The issues observed are that, a single mobility mode is not supportive or optimal and for all the terrain types like flat, sloped, staired, rough, muddy and cluttered. Another issue is that, different levels of autonomy is required depending on the environment condition. The current state of the art reconfiguable robots aim to solve this problem by transitioning between various mobility modes. Nevertheless, these rely on sophisticated mechanisms to disassemble and reassemble modules at different nodes, which increases the size, weight, and power (SWaP) requirements, and also the motion planning complexity. In this work we propose QHuMuS: Quadrupedal Humanoidal Multi-terrain Snake Robot, that performs reconfiguration between the mobility modes of serpentine, wheeled quadruped, and humanoid without any re-arrangement. This work mainly addresses the design of such a reconfigurable robot, and the development of baseline gaits between all the possible configurations. Hence our proposed system has lesser SwaP requirements and motion planning complexity. Additionally simulation results are also provided that showcase the capabilities of the system.
Aditya Shirwatkar
PhD Student (IISc) | Visiting Researcher (TUM)
My research interests include robotics (primarily legged), optimal control, and reinforcement learning.